Vehicle-Enabled Water Quality Monitoring for Greater Spatial Coverage
(Updated November 2021)
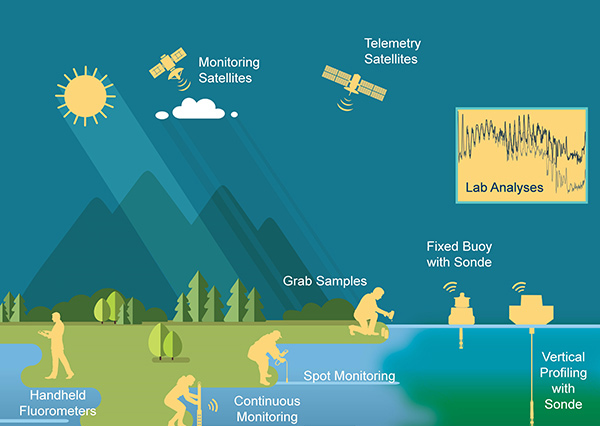
I’ve used the Figure below in a lot of Harmful Algal Bloom (HAB) presentations because my colleague Patrick Beatty’s artistry so beautifully shows the standard ways people collect HAB data in the field. (Learn more in this webinar, Monitoring for Harmful Algal Blooms: From Data to Decisions, Part 1 of 2). However, this Figure really is not limited to HABs, as it shows the most standard ways people collect any water quality data in an outdoor setting. Yet, there’s something missing…
Notice that all the approaches on the ground are fixed in one place. Only the profiling buoy can reach beyond a single spatial coordinate to deliver high-resolution data to the telemetry satellites or cell towers that get the data to your desk. Monitoring satellites (e.g. MODIS) give great spatial coverage, but at a resolution that is not suitable for things like beach monitoring or reservoir monitoring.
So what would you use if you want high-resolution data as you’d get from the Earth-bound approaches, but over a lakewide area that is too big for those approaches, and too small to be viewed with a monitoring satellite?
That’s the challenge in today’s water quality monitoring world: how to get a high density of high-quality data points per unit area. One way this can be achieved is by having a high spatial density of individual sensors, a proposition that is somewhat limited by sensor cost, or in the case where cheaper sensors are available, the quality of the data they deliver. Of course, telemetry from that spatial network can also be a barrier.
While tremendous developments related to low-cost, high-quality sensors are ongoing, another option is to deploy high-quality sensors to a broader area using an autonomous vehicle, to get a high density of data per unit area in a narrow window of time.
AUVs, ASVs, ROVs, UUVs, and aerial drones fill in this high-data-density gap. If you’re like me this world of “Vs” may seem a little daunting, maybe even inaccessible. That perception is probably rooted in the history of these vehicles and how we have seen them used. The reality is that vehicle-enabled data collection is truly accessible to all.
What’s the difference between a UUV, ROV, AUV, and ASV?
You will see these abbreviations used slightly differently depending upon the context and people using them, but since they invented some of the earliest vehicles and these terms originated in the world of oceanography, let’s start with definitions from the National Oceanic and Atmospheric Administration (NOAA):
- UUV = Unmanned Undersea Vehicle
- ROV = Remotely Operated Vehicle
- AUV = Autonomous Underwater Vehicle
- ASV = Autonomous Surface Vehicle
Simply put, the point of these vehicles is that a human doesn’t have to be on board to operate them. The trend towards using vehicles started when we wanted to go places in the ocean where it wasn’t safe for humans to go. Organizations like the Woods Hole Oceanographic Institution (WHOI), the U.S. Navy, and NOAA were all pioneers in developing these unmanned technologies, albeit for very different purposes. The terms, like the technologies themselves, have been evolving ever since.

A worker recovers an ROV after an oil and gas pipeline inspection.
UUV is a term you won’t see very often these days, partly because it is more categorical in nature. ROVs and AUVs are types of UUVs, and further, since vehicles are now used for exploration of inland waters and coastlines, not just the open ocean, “Underwater” is often implied for that second U, instead of “Undersea.”
Unmanned Surface Vehicles (USVs, in case you wanted another acronym) were used in the post-WWII to modern-day era as minesweepers. “USV” is now more commonly called an ASV, which is a smaller, lighter vehicle with modern command protocols and positioning technologies.
Like USVs and ASVs, military applications drove the development of AUVs. Some of the earliest—and still best—were developed by Bluefin Robotics, which today is owned by military contractor General Dynamics. AUVs are sometimes called underwater drones, and I’ve also seen the term “glider” used to describe an AUV that has hydrofoils (fins) enabling it to glide forward while plunging deeper into the water. A notorious example is the AUV launched by Americans in the South China Sea, which was seized by Chinese authorities in 2016.
ROVs and AUVs are sometimes confused. The main difference, again according to NOAA, is that an ROV is tethered to a ship by cables that deliver power and command protocols used to navigate the vehicle. But when did we start looking at these technologies for oceanology rather than military applications? If you’re pushing 50 like me, you may have shared my sense of awe in the mid-1980s when an ROV called Argo revealed to us the wreckage of the RMS Titanic, under the leadership of now-legendary explorer Bob Ballard. Ballard was a former Navy guy working at WHOI at the time, and I feel like the Titanic and National Geographic’s coverage of the discovery was the first time most of us became aware such a thing was possible. Whether you were fascinated by the rediscovery of the Titanic or not, WHOI is the organization that I personally credit with bringing the “Vs” into the research realm, notably for the study of red tides as described below.
HAB Monitoring with Vehicles
WHOI is still a leader in underwater vehicle technologies, and their web page devoted to the topic shows at least 8 types of vehicles for coastal and deep-sea exploration, and there are even more in their presentations and publications. For example, the Remote Environmental Monitoring UnitS (REMUS) has been specifically used for red tide monitoring off the coast of Florida, as published by Robbins et al. in 2006 (Harmful Algae 5(6):749-761). In this paper the authors describe using the REMUS from WHOI with the Optical Phytoplankton Discriminator (OPD) developed at Mote Marine Laboratory in Florida.
The OPD is an automated instrument that directly measures both phytoplankton and colored dissolved organic matter (CDOM). It’s almost a happy accident that CDOM is also supported by the OPD, which was really designed to discriminate between multiple types of chlorophylls found in phytoplankton for doing population analyses. Justin Shapiro et al. explain the OPD and its use with AUVs in Chapter 18 of Coastal Ocean Observing Systems, (Liu, Kerkering and Weisberg, eds., Academic Press 2015). Table 1 of Shapiro et al. provides a great list of examples where AUVs have been use for HAB detection and monitoring by the likes of EPA, NSF, NOAA, agencies in the State of Florida, and Rutgers University.
The example that you can’t escape if you attend a national or international algae conference is the Environmental Sample Processor (ESP) pioneered by the Monterey Bay Aquarium Research Institute (MBARI). The vehicle platform for the ESP is called the Tethys which has been revolutionary because of the substantial payload it can bear, yet it is rather small and has extremely long range (over 1000 km!). With the ESP payload it can not only detect algae but it can even do testing for algal toxins right on the vehicle, delivering data back to the ship-bound scientist who deployed it. Water samples can be collected and returned for additional laboratory analyses. The ESP was deployed in Lake Erie in 2019 for HAB monitoring, and a third generation vehicle is in development.
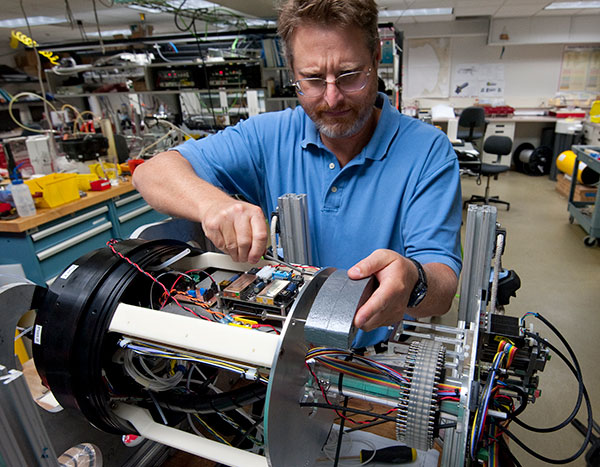
Mechanical Engineer Doug Pargett builds the third-generation Environmental Sample Processor (ESP), a robotic water sampler designed specifically for collecting and analyzing samples to provide a persistent presence in the field without necessarily requiring someone to be there in person. Credit, Todd Walsh © 2014 MBARI.
These game-changing technologies have just one problem, and that is that they are still not very accessible for the average Joe Schmo. Though small by oceangoing standards, the ESP is still pretty big, needing to be deployed from ships by a team of people. Most of these vehicles are technically complex, and they are still too expensive to be used by people outside of the research institutions where they have been developed (though I expect that to change in coming years). Further, most of us don’t have a budget that matches that of the U.S. Navy, WHOI, or MBARI.
So are there “Vs” for the rest of us?
Water Quality Monitoring with YSI Vehicles
YSI’s first foray into the vehicle world was with the EcoMapper, the latest generation of which is sometimes called the i3XO. The vehicle itself was developed in partnership with Ocean Server, now a subsidiary of the L3Harris group. The EcoMapper was ahead of its time when first launched over 10 years ago, equipped with sensors that provided high-resolution mapping of water quality, currents, and bathymetry all at once, with a 100 m range. The i3XO has updated and more flexible options for sensors as well as forward object avoidance, built-in GPS and WiFi. This remote-controlled AUV is deployable by one person (unless that one person is me—I require a partner to get it in the water!). Even if you need some help as I do, you’ll still be waaaay ahead on the person-hours that would be required to collect this much data in the same amount of time. (Learn more with this video, YSi i3Xo EcoMapper AUV Data Collection).
Putting it plainly, I could write loads of stuff that I don’t actually understand about all the technology on the i3XO (or the EcoMapper). If you want to talk shop you can call one of our engineers in our Integrated Systems and Solutions group and nerd out, or you might take in some brochures and specifics.
What’s more exciting to me is how the work of our customers demonstrates the ability of YSI’s EcoMapper vehicles for filling the spatial coverage gap I talked about above. My colleague Shawn Sneddon wrote a great piece for Sea Technology, describing several examples where AUVs were being used by researchers all over the globe.
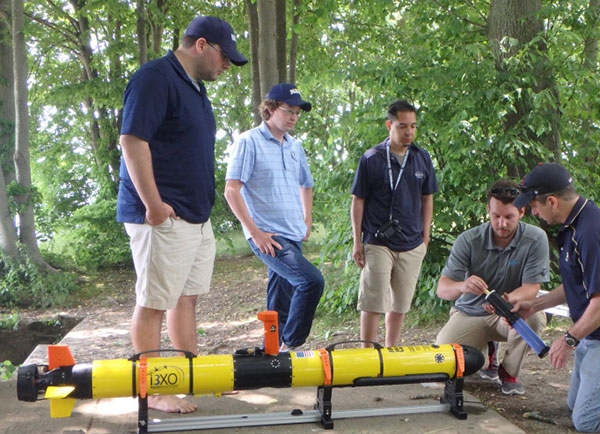
United States Naval Academy Oceanography Department faculty engage in AUV training prior to deployment. Shown is the i3XO EcoMapper from YSI Integrated Systems and Services.
Recently the U.S. Army Engineer Research and Development Center’s (ERDC) Fish Ecology Team posted an awesome video showing how they’re using the EcoMapper for monitoring water quality in the Mississippi Floodplain, and even more specifically in “borrow pits” left behind by construction projects that removed soil, gravel or sand for relocation to another area.  Borrow pits have so extensively scarred the Floodplain that now they are actually an integral part of the overall ecosystem, serving as aquatic habitat and breeding sites for a number of fish species.
Borrow pits have so extensively scarred the Floodplain that now they are actually an integral part of the overall ecosystem, serving as aquatic habitat and breeding sites for a number of fish species.
As described by ERDC’s scientist in the video, they use the EcoMapper to capture six different water quality parameters, bathymetry and side-scan imagery for thousands of points in a matter of hours across acres of coverage. The water quality is studied for how it impacts, or is impacted by, the fish assemblages and other aspects of the system. Ultimately this helps to drive management decisions in individual borrow pits and indeed across all areas of the Floodplain that the USACE manages.

Members of the ERDC's Fish Ecology Team deploy and retreive the EcoMapper in a borrow pit. Both photos above courtesy Bruce Reid, Lower Mississippi River Conservation Committee/Mississippi River Trust, 2019.
Another YSI vehicle resulted from a collaboration between our Xylem Australia Regional Integration Center (RIC), our Xylem UK RIC, and our San Diego-based SonTek team. It all started with the Torrent Board developed by the UK team in 2016-2017, a low-drag, deep V keel board developed to operate across a range of velocities, while carrying the SonTek RiverSurveyor ADCP systems, the M9. Our clever UK RIC developed a modular package to turn the Torrent Board into a remotely controlled vehicle which we refer to as the rQPOD. Another element of the total system is the HYPACK software used to set up bathymetry missions for the rQPOD.

The rQPOD has already gone where no person should go. If a “mine pit” sounds like something you might not want to send a diver into, you’re right. These pits contain impounded waters from the mining process, and it’s a major safety concern to send personnel on boats out to assess the water volumes in the pits, a measurement that is required for environmental reporting by mining operations in Australia. In our Australia RIC recently surveyed mine pits that had waters with a pH of 1 (you read that right!), and that’s why an unmanned vehicle is perfect for the job. The rQPOD allows for remote entry and egress via a trolley with the survey requiring no contact with the water body by the operator. The picture below shows how a vehicle exposed to acidic wind spray waters comes out, after ably completing its task and with no people exposed to the dangerous environment.

Photo courtesy of Steve Bird, Xylem Analytics, copyright 2019.
A similar project using the rQPOD is described in this case study from the Kalgoorlie Mine Pits in Australia. The speed and safety with which the data could be acquired are clear, but another benefit is that using the rQPOD positively impacted the mining company’s ability to gauge the proper placement and capacity for pumps and suction equipment, for a more cost-efficient operation. In other words, the ROI on the rQPOD and the service associated with the survey was immediately realized.

That brings me to the last example I want to share with you, which is an ASV developed here in North America via collaboration between our own RIC, based in St. Petersberg, FL, and a company called Sea Robotics. A veteran team of engineers at Sea Robotics has developed a number of unmanned systems primarily for, as their name suggests, ocean-based surveys. YSI worked with them to develop a lightweight boat that includes all the features of the rQPOD, but with the addition of water quality sensors (an EXO2s sonde) and side scan sonar. As discussed in a Mission Water #5 Automated Vehicles article, the HYCAT really is the future of monitoring, specifically for covering the spatial data density gap we are talking about in this blog. Like the EcoMapper and the rQPOD, I’ll let the engineers and the online literature answer your questions about the HYCAT’s specs—what interests me more are the projects themselves!
Recently our team joined scientists on the Charles River (Learn more, For the Love of Charles | A River on the Rebound), where we once again returned to my pet topic of HAB monitoring. The Charles frequently has HABs that are dominated by blue-green algae of the genus Aphanizomenon (in contrast to the Microcystis-dominated blooms more commonly seen around North America and only occasionally in the Charles River). As a river system, blooms on the Charles move around, and are subject to a number of different influences, particularly on the Charles.
The team studying the Charles wants to track blooms in a way that a fixed station (or person) really can’t do efficiently. They wanted to learn how the structure of the system influences not only the blooms but also the differences in dominant species, duration, and intensity of the blooms. They actually used both the i3XO EcoMapper and the HYCAT to evaluate those questions for the first time in Summer 2019. The insights they gained from the initial runs exceeded their expectations, and their hope is that, rather than actually purchasing the vehicles, they will be able to continue to work with YSI to perform occasional operations for them. We learned a lot, too, as this experience has led YSI to start pondering more service-based offerings associated with our vehicles. Hopefully, you’ll hear more about that from us in the future!

In Summary
Unmanned vehicles are an excellent option for filling the spatial gap, when one wants high-density, high-quality data from an area that is too large for multiple monitoring stations to be economically feasible, and too small for a monitoring satellite to tackle. Here we talked about a number of vehicle examples, but the take-home message is that YSI’s vehicles are small enough, and affordable enough, to be accessible in ways never before possible. We are planning to continue to add to our suite of vehicles, and also we want to develop service-based programs when purchasing a vehicle just doesn’t make sense. I’d love to hear more from our customers about vehicles, sensors, and services we should consider offering using these technologies!
Download: i3XOEcoMapper FAQ
Download: HYCAT FAQ

Additional Blog Posts of Interest
For the Love of Charles | A River on the Rebound
The Latest in HAB Research and Technology
Data-Driven Decisions Improve Lake Health
How Algae Sensors Work | Answers to Four Challening Questions