5 Tips for Better Water Monitoring with Autonomous Surface Vehicles
The below transcription has been slightly modified for text.
Video Transcription
Transcript by Speechpad
(Updated August 2021)
Rob: I want to take a moment as we kick off our webinar today to introduce the presenters who'll be leading our discussions today. I'm Rob Porrett, the YSI Integrated Systems and Services Product Manager. I'm really excited to be here with everyone today and hope everyone that participates on the call today gains a lot of knowledge from today's presentation.
We also have Kevin Simpson from Xylem. Kevin is the Director of Systems Engineering with Xylem and brings over 20 years of experience in system integration and innovation.
And lastly, we have Geoff Douglass, Product Development Manager with SeaRobotics. Geoff has almost 10 years of experience with autonomous surface vehicle technology and the integration of technologies in unmanned surface vehicles.
Once again, I'm Rob Porrett, YSI Product Manager. And I want to get a start on today's presentation by going over the goals. Really, the goal today is to provide everybody on this webinar some tips for better water quality monitoring. We'll get into some details to help improve your efforts. We do want to do an overview on autonomous surface vehicles. We're calling this autonomous surface vehicle 101 and it's really to introduce everybody to the concepts and how you can utilize an ASV (Autonomous Surface Vehicle).
And lastly, we wanted to introduce everyone to our new Xylem product, the HYCAT autonomous surface vehicle. I do want to take a moment to remind everybody as we kick off the webinar, please submit questions on the right hand side if you have any but we will be addressing questions on the live Q&A at the end but if you do have any questions that come up during the presentation, please utilize the box on the right to enter your questions.
We at Xylem have partnered with SeaRobotics to put together this webinar. I wanted to take a little time at this point in the presentation to present an overview of Xylem and we'll also do an overview of SeaRobotics to kind of understand our background.
Xylem is a leading global water technology provider and we're made up of strong brands across the world focused on smart water. We actually have a global footprint which extends over 150 countries and we are made up of over 16,000 global employees. We developed our technology time andoour talent to advance smarter water use.
Now, I'd like to take a chance to turn over the presentation to Geoff Douglas at SeaRobotics. Geoff will provide an overview of the company at SeaRobotics and then will lead us in the review of the five tips for better water quality monitoring.
Geoff: Thanks, Rob. Hi, everybody. My name is Geoff Douglass. I'm the Product Manager at SeaRobotics, primary focus on autonomous surface vehicles. SeaRobotics is located in Stuart, Florida. We've been around since the year 2000 and our primary focus is we specialize in all things marine robotics with a special focus in ASV technology and hull grooming ROV products.
So I'm going to lead our way in through our benefits of the technology and our tips for this webinar. So, for the purpose of this webinar, I'm going to focus specifically on the survey market. There's many applications for ASVs but I think everyone here we're primarily focused on surveying.
So there are two main markets for ASVs currently in the survey world. One is offshore and one is coastal inshore purposes. Offshore technology is being used to collect metocean data.
These are usually long endurance vehicles…can go out for months at a time to collect data. We have force multipliers where you have vehicles ghosting or following motherships, basically multiplying the amount of data that they're able to collect with the same amount of resources. We've got underwater vehicle husbandry and also marine mammal monitoring. So around seismic operations or drill sites or just doing environmental surveying to make sure that it's safe to do some of these processes.
Inshore, there are major benefits of this technology. Really, one of the main benefits is that you can survey an area that you cannot physically access without a small vehicle that you can get at with an unmanned boat. Small unmanned boats do not require boat ramps, they don't require nice bodies of water or level floats to be launched and recovered so that's the main benefit of them. They can get shallower than manned vessels because usually the propulsion can be tucked up under the hull. And they minimize operating personnel or expertise because you no longer need a boat driver. Really, the surveyor and the boat driver are the same with the autonomous vehicles.
And where they meet together where the real benefits kick in. You've got streamlined workflow of your survey. You've got increased survey efficiency, reduced operating cost, increase work safety and minimal environmental impact. Just to explain that last point, you've got minimal environmental impact because these vehicles are smaller, it costs less to move, ship them around to do surveys but also they don't require gasoline, a lot of them are electric powered or run on renewables when you're looking at the metocean vehicles for instance. So, they just overall reduce your footprint impact of surveying.
Tip #1
So now I'm going to start our tips. Our first tip here is choose the right sensor for the job. The surveys need to understand which sensors, which to choose to meet their project goals. Choosing appropriate sensors will ensure that delivering...if you choose the right sensor, you can make sure that you're giving your customer the right product that you want to deliver to them. And I want to take a moment here to focus on this table.
| Survey Application |
Sensor Suites |
| General Bathymetry |
ADCP (Acoustic Doppler Current Profiler)/Single Beam Sonar/Side Scan Sonar |
| Cartography |
Multibeam/Single Beam Sonar |
| Subsurface Infrastructure Inspection/Feature Detection |
Multibeam/Side Scan Sonar/Sub Bottom Profiler/Magnetometer |
| Above surface Survey |
LiDAR/Photogrammetry/Video |
| Water Quality |
Multiparameter Sondes/Samplers/Current Profilers |
| Volumetric Discharge Measurements |
ADCP |
| Habitat Mapping |
Any Variation of those Stated Above |
There's two specific sensors that are relevant for us here. And they are ADCPs (Acoustic Doppler Current Profiler) and Side Scan Sonars. If you look at the survey application, there are several applications in which those two sensor suites fit in.
And so if you choose the right sensors for your vehicles, you can really open up the markets and the products that you can offer your customers. It's something very important when you're looking into this technology, "What can I put on it and what data sets will that allow me to reach?"
Tip #2
So our second tip is that autonomy counts. So the A in the ASV is autonomy so this is really important. Academically, there are three levels of autonomy. They are RC, basic autonomy, and advanced autonomy. And really, RC is remote control, there's really no autonomy in that. But for the focus of this, I add a fourth level called mature autonomy.
And that's because it's really where the industry is. So for all practical purposes, we want to be talking about mature autonomy. And the important thing to note is that the level of autonomy increases, situational awareness increases, surveyor confidence increases, and survey efficiency increase. So I'm going to go through the levels now.
So first level is remote control. This is really the least safe way to operate an unmanned vehicle that's because the driver of the boat is the guy who's running it with the remote control. They can't focus on the data, they have to physically be in the loop to drive the boat the whole time and it's hard to do that when you're standing on a riverbed to understand really what's happening with the vehicle, why is it not doing what I want it to do. So it's a very inefficient way to survey.
Next level is basic autonomy. Basic autonomy vehicles, they have simple waypoint navigation, they can basically have an autopilot. They can run straight lines but they have got limited continuity with the acquisition software. Meaning, if you wanted to switch lines in the software, the vehicle doesn't know that, you have to start over, send new lines to the vehicle. These are just things that kind of slow down the process of collecting data. They also have limited fail-safes. So they may not have the ability to avoid running aground, monitor their own health. So in this feature with basic autonomous systems, operators still need to be in the loop overseeing the vehicle at all times just to make sure that everything's going appropriately.
Well, from there I'll go onto our next stage. So the next stage, this is really where most of the products are heading in this industry. This is to have mature autonomy. So mature autonomous systems have both features of the RC system and basic autonomy, but then they have more, make them safer to use. So they have system redundancy, health monitoring, collision and grounding avoidance, seamless integration with data acquisition software. That part's very important.
So in the real world, when you're making survey lines, you're doing it from home, you get to the work site and then you find that there's an obstruction in the way of that survey line, or sometimes you find that the lines are made inappropriately while you're surveying and you need to switch the direction or the size of the lines. If a vehicle is tightly coupled with the acquisition software, you can change those lines in real time and the vehicle will adapt in real time. So this really connects the link between the acquisition and the vehicle performance which streamlines surveying.
And the main benefit of having a mature autonomous system is that they're smart enough because of all the fail-safes built in. You don't have to worry about them running aground. You don't have to worry about them leaving a designated boundary for instance and you don't have to worry about any, let's say battery capacity issues or things like that because the vehicle's continually monitoring and reporting that information. Now, if there's an issue it's going to tell you.
So, by having mature autonomy, surveyors have to have limited oversight of the vehicle and they can focus primarily on the data that they're acquiring and that's a huge benefit because for instance, some of our customers of these vehicles, they are post-processing data in real-time while they're collecting it. You don't need to worry about the boat, they can post-process data. If they don't have to worry about the boat, they could also run multiple boats at the same time with the same amount of assets. This is where the real efficiency of the vehicles comes through.
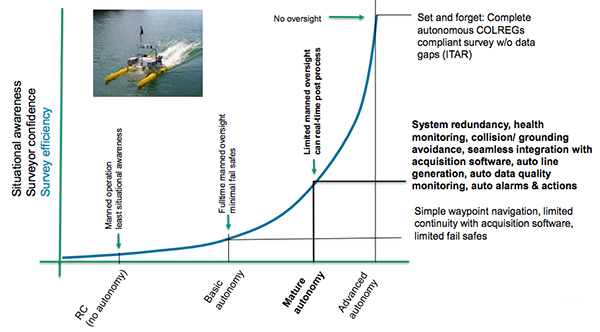
The last level of autonomy is advance autonomy. The best way to describe this is set it and forget it. So, this is a complete autonomous COLREGs compliance system. COLREGs is a term, I'll just streamline it into it's basically the rules of the road for marine vessels. And a truly advance autonomous system would have the ability to get kicked in the water and complete a survey.
If it's going to get shallow, it's going to automatically drive around the shallow area. If it's going to get shallow and there's a boat coming at it, it's going to navigate around that boat and the shallow area and know to come back and fill in the data gap that it had missed. That's an advance autonomous system.
Right now, advance autonomy is an ITAR restricted item in the United States, meaning it's on the U.S. musicians list as an export restricted item. So this is where everybody's really working towards but right now, for the industry, the best you can get really is vehicles that land in this mature autonomy category. We'll go on to our next tip.
Tip #3
So our third tip is that tight integration has payoff. So there's a significant value-add to acquiring systems that are tightly integrated versus systems that are not tightly integrated. Tight integration reduces survey pre-planning activities such as configuring seminars, measuring offsets, conducting pass tests. These are all things that if surveyors are out integrating sensors on their own can add significant time to the process, and also a lot of uncertainty. "Is this system reliable? Am I going to get high-quality data? Do the thrusters interfere with the sensor?" If you're purchasing a tightly integrated system, you can rest assured that the manufacturer has already worked all that out.
Another benefit is that sensor installations are optimized. So if you get a tightly integrated system, the manufacturer has gone through the process of making sure that everything is mounted, how it needs to be mounted in a way that it's getting the best possible data that the sensor can give.
Tip #4
And then tip four is intuitive interfacing. So, for unmanned systems, one thing we try to do all the time is instill user confidence. Get people to make sure they're comfortable operating these vehicles. The best way to do that is to streamline the interfacing. So, we've gone through the practice of trying to get our interfacing as streamlined as we can and we really are aiming for a single software package solution.
So if you were operating a boat and collecting data from a single software package, you're streamlining your workflow, you're enhancing the user experience and you're enhancing the user situational awareness. And this is because if you can imagine some of these systems right now, most of them operate with several software packages. There's no continuity between the data acquisition software which is really what the surveyors care about.
The end result of this is we want the data. The nuisance is that they have to understand where the boat is. And if you have two different software packages, it can become cumbersome trying to translate between the two to figure out how one is affecting the other. So, when you pull them in together, it becomes more apparent as the overall situation of your survey, where is the boat, how is the data being affected, how the data got there, why, let's go back and get it. All that is more easily to navigate through if you have a tightly integrated package.
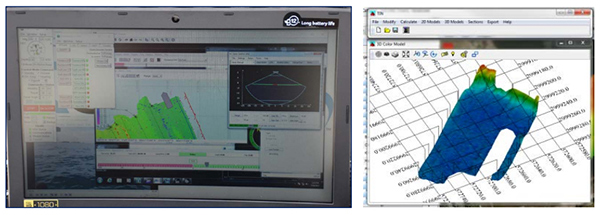
And then the benefits. We have a predefined hardware set-up. So it's all in one system. We can have predefined hardware parameters set up for the software and the sensors that we're using, that real-time continuity between data acquisition and vessel navigation. Meaning, in this instance, if you're running HYPACK and you want to switch lines or shrink lines, you could do that in the software and the vehicle will automatically respond. And then also we reduced the screen requirement.
So down here in the pictures in the lower left, that's kind of the basic screen. This is of a multi-beam, this is with a boat with multi-beam on it with HYPACK. It's running an auto-align function. But you can see all the information the user needs is on this one little laptop screen. But sometimes not the best way to display all the data, but you could put it on one screen because it's in one software, which is nice. It's just one that's the amount of support equipment you need when you're surveying. And then on the right-hand side, this is just an image we threw in here. That's imagery data that was collected with the SonTek M9 ADCP.
Tip #5
And then our fifth tip is choose brands with experience. So SeaRobotics partnered with Xylem's brand SonTek, HYPACK, and YSI. SonTek, HYPACK and YSI are leading brands, best in class brands in the markets of hydrology and water quality. Together they've got over 140 years of experience. And then, where SeaRobotics fits in is that we were actually the oldest ASV manufacturer.
We've been developing them for over 18 years. We specialize specifically in sensor integration. We primarily offer vehicles for multi-beam surveys but we've integrated just about every hydrographic sensor you could imagine into these vehicles. We've built over 30 unique custom vehicles and we've delivered several built-to-order production vehicles.
So with that experience, because integrating these sensors into complex systems is a non-trivial practice. At SeaRobotics we have software, electrical, and mechanical engineers that take part in every project that we do to make sure that when we kick something out the door, it's tightly integrated as it could be.
And I think with that, that sums up my part of the presentation. I'm going to kick this over to Rob who's going to segment us into the next part. Thank you, guys.
Rob: Thanks, Geoff. Before we continue on, obviously Xylem is new to the ASV market, but a question has been coming up for me in particular. Why would someone choose an autonomous surface vehicle over a manned vessel?
Geoff: Yeah. So that's a good question. We mostly get that question from the guys that are in the inshore market. And the answer to summarize is my slides. Main benefit is force multiplication. I'm going to use one of our customers in the example here, Canadian Hydrographic Services is one of our largest customers.
They have four of our vehicles and they use the boats as force multipliers. They'll do surveys in rivers with the mothership down the middle of the river, and they'll send the ASVs out to the sides in the shallow areas where they can't get, with the same amount of surveyors they're covering three times survey area and not needing to backtrack. That's one main benefit.
Another major benefit is you can literally get an area with these vehicles that you can not get with a manned vehicle. There's no boat ramp, there's no way to get a manned vehicle. You can get there with a smaller vehicle. And then the other thing is that tightly integrated systems are just easier to operate than manned boats. You don't need a boat driver for these. Surveyors are operating these ASVs. Really, surveying with an ASV is kind of a pleasant experience and it can get boring sometimes, people are just sitting back, drinking coffee, watching the data come in. That's really the goal that we're going for with the technology.
Rob: (a poll was taken at this point)
All right. I do appreciate everyone's feedback on that poll. At this point, I would like to turn the presentation over to Kevin Simpson.
Kevin: Okay. Good morning, good afternoon everyone. Thank you, Rob, for the kind introduction. And thank you, Geoff, for your helpful tips and for sharing your professional experience with autonomous surface vehicle development.
Geoff: No problem.
Kevin: In the big picture vantage point, I would like to discuss how ASVs can be used as an effective tool for selection of portable and dedicated work quality in hydromet monitoring sites. All monitoring applications and their respective goals are uniquely specific. The behavior and the characteristics of the watershed in consideration including the meteorological impacts and the behavior of the adjacent hydraulic model. Leveraging ASVs for watershed characterization will provide vital insight into proper sight and instrumentation selection for optimizing hydrology and water quality monitor networks.
ASVs provide a means for determining important influencers throughout seasonal changes and significant weather events. These include water circulation, velocity information, water discharge calculations, symmetry, volumetric calculations, cross-sectional geometry, spatial surface water quality measurements, subsurface imaging, and real-time video recording during the vehicle's mission.
By using underway and post data processing solution tools from hydrographic survey software packages like HYPACK, users can gain vast amounts of information that typically would take weeks, months or even years of discreet monitoring efforts using an array of individual instruments, field and boat deployed monitoring crews. So the characterization model provided by single vehicle mission can tell a story not otherwise able to be told.

So next I would like to share with you several case studies leveraging the use of autonomous vehicles for a big picture view of several unique watersheds. Above, Clinton Lake is a 4,900-acre lake surrounded by Clinton Lake recreation area as a popular destination for fishing, waterskiing, swimming, hiking, and picnicking in Central Illinois. The land in the lake is owned by Exelon Power Company that operates the Clinton Nuclear Power Station in the area. The state of Illinois has operated the park since 1978 through a long-term lease with a utility company.
The Clinton Power Station produces 1,043 net megawatts electricity for 1 million homes and uses Clinton Lake to cool the plant's thermal discharge. Clinton Lake is currently on the EPA's 303(d) list of impaired waters with a low priority status and as classified as eutrophic. Sources of the pollution are primarily agricultural runoff, shoreline erosion, urban runoff, and sewer septic tank point discharge.
There are currently no TMDL, which stands for Total Maximum Daily Load targets reported for this water body and a source of impairment is listed as unknown. Groups monitoring the lake and Exelon are interested in using the YSI EcoMapper autonomous underwater vehicle to autonomously produce high resolution, thermal and bathymetry maps of Clinton Lake of the environmental impact in the thermal capacity studies.
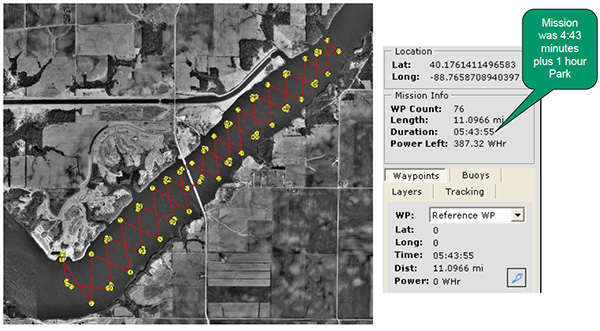
Clinton Lake Study - Mission Planning
Here's an image of mission planning and power endurance estimating tools that are typical with ASVs and AUVs alike. Used to validate in a specific mission before commencement. The mission was planned along the down stream quarter from the nuclear power plant cooling water discharge points. So if we take a look at this slide and look at the top upper right-hand corner, that's the location of the thermal discharge from the nuclear power plant and you can see how easy it is to plot course. You don't have to be an experienced navigation professional to understand the complete use of nautical terms in charts. It's simply a point and click solution to begin a mission planning process.
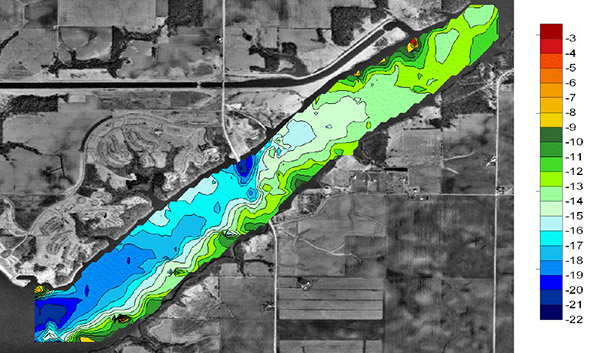
Clinton Lake Study - Depth
AUVs and ASVs equipped with DVLs, ADPs and other sonar capable instruments allow for bathymetry surveys as shown in this satellite image with a depth contour overlay. Darker blue shades indicate deeper water while greens and reds indicate shallow water. So again, if we look at the top of this image, you can see the shallow water right there at the nuclear discharge point and then as we move down the corridor, you can see the deeper water into the larger lake.

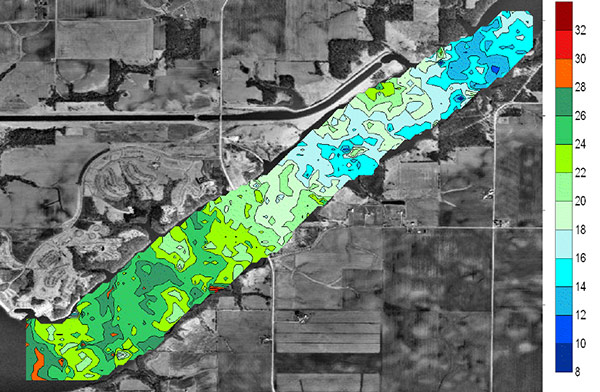
Clinton Lake Study - Temperature
So this image illustrates the water temperature dispersion downstream into deeper water from the discharge of the cooling water back into Clinton Lake. So again, as you can see, the shallower water and the thermal discharge create warmer temperatures in red and the green and blue as it cools off and heads towards the lake.
When looking for suspected eutrophic events in water bodies being able to find hotspots, where dissolved oxygen, temperature, pH and other measurements are not within normal, diurnal ranges, can be extremely useful in these type of studies. Spatial data mapping solutions provide a significant advantage in the identification of potential point source contributors in areas not receiving adequate water circulation. Again, this enables better permanent monitoring site selection and can also be used to mitigate problematic areas in the watershed when applicable.
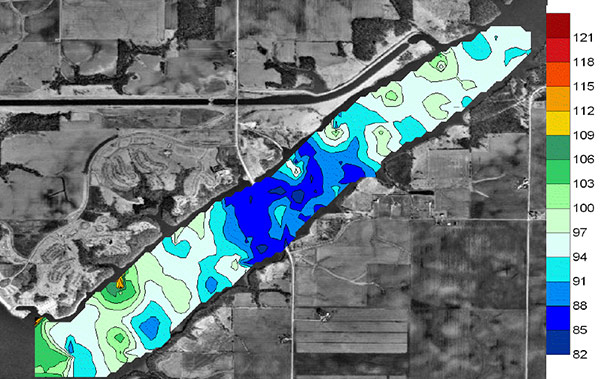
Clinton Lake Study - Dissolved Oxygen
So again, if we look at this, you can see in the middle, the blue indicates relatively healthy dissolved oxygen around the 80% and as we move into the whites, greens and reds, we get higher and higher dissolved oxygen so it's likely that this study was done during the daytime and if we specifically look at the bottom left-hand corner, you can see a red spot. That has nothing to do with the thermal discharge from the nuclear facility but actually is a tributary and potentially likely is due to some agriculture runoff or other influencer. So these are the type of hotspots that we like to identify using spatial mapping.
Being able to spatially visualize chlorophyl fluorescent measurements from an AUV or an ASV can further provide surrogate data along with dissolved oxygen to identify potential point source discharge of nutrients, etc. Running multiple ASV missions after significant storm event can also be used to better understand the latency period of the impacts to the specific watershed as well as the seasonal and diurnal fluctuations.
Clinton Lake Study - Chlorophyll
So again, if we step back and look at this image, you can see the lower half being the higher fluorescents and the upper being the lower. So as we move down this quarter into some of the runoff and agriculture runoff, we get higher and higher levels of chlorophyll fluorescent.
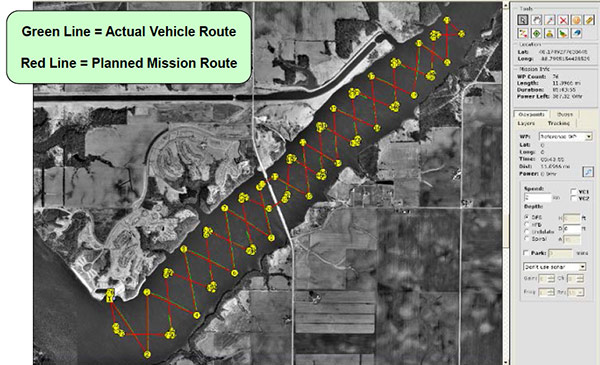
Clinton Lake Study - Mission Log
This image illustrates both waypoint-based pre-mission planning and the actual post-mission route in an AUV or ASV to ensure proper validation of the mission and the route.
This year reference satellite image with the buoy monitoring network overlay illustrates the second case study I would like to discuss. Cardiff Bay is located in South Cardiff which is the capital of Wales within the United Kingdom. Prior to the year 2000, Cardiff Bay was a tidal saline estuary with access to the sea limited to a couple of hours each side of high water. This transformation from a tidal estuary wetland to a freshwater lake took an act of parliament and construction of the new barrage or dam was completed in 2000 along with the system of three locks allowing 24-hour vessel access to and from the sea.
So today Cardiff Bay is supplied by two rivers, the Taff and the Ely to form a 500-acre freshwater lake around the former dockland area south of the city center used primarily for water recreation by the community.
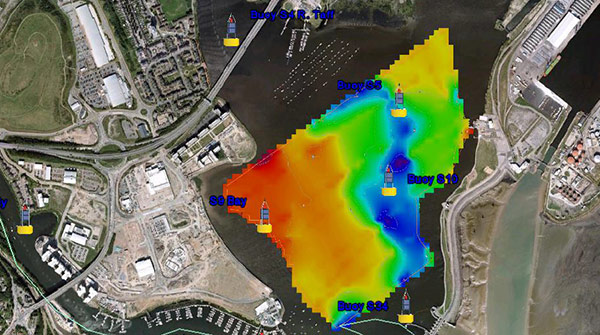
Cardiff Bay - Bathymetric Data
This image of Cardiff Bay illustrates the bathymetry data collected from the vehicles' vertical beam sonar. Note the barrage or dam and the three lock system at the bottom of the blue deeper shading in the lower right-hand corner of the lake. So if we stand back and look at this image, again, we can see the newly constructed dam, the lock system and the deeper quarter corridor of water leading into the freshwater lake.
This three dimensional post-process image illustrates the bottom contours or bathymetry as viewed from upstream of the two merging rivers back towards the barrage or dam and the lock system in the distance. Again, note the deeper blue sections leading from the barrage dam and the lock system in the distance across the freshwater lake towards the two river mouths.
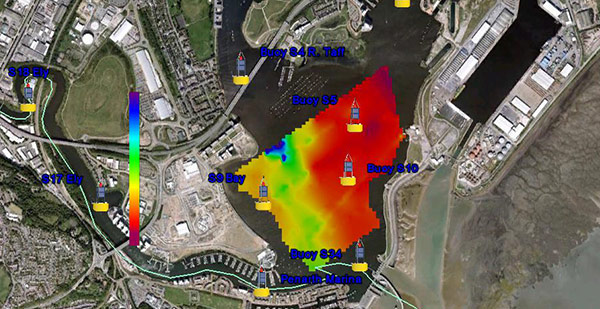
Cardiff Bay - Temperature Data
In this visualization is the spatial dispersion of water temperature. Note the red which is the warmer water infiltrating in from the sea into the lake on the right side adjacent to the lock as it moves out into deeper side of the lake. So based on the bathymetry data, you can also see where the saline water is infiltrating into this freshwater lake when the lock system is used.
So finally, this image illustrates the salinity infiltration from the lock system into the freshwater lake. It's very similar to the temperature one I showed before. And on the right hand, it's shaded in red. By design, several of the buoys deployed in the red areas have WiFi Exon multiparameter water quality monitoring instruments deployed at three different depths in the water column, the surface, the middle, and at the bottom.
These real-time data buoys deliver the salinity and water quality data to the Cardiff Harbour Authority's data system where a network of bottom-mounted subpumps remove the heavier saline water from the lake as it stratifies down the water column. According to the Cardiff council, the creation of Cardiff Bay is now widely regarded as one of the most successful regeneration projects in the United Kingdom.
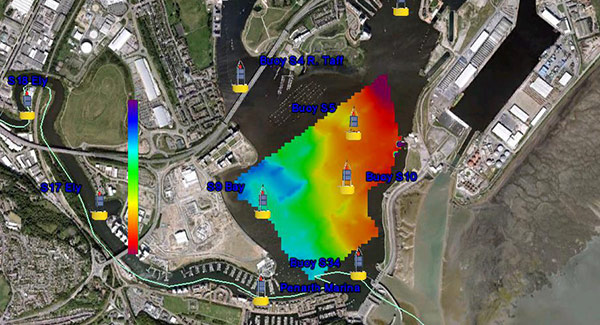
Cardiff Bay - Conductivity (Salinity) Data
So if we stand back and look at this picture again, we can see on the right-hand side where that deeper water is in the infiltration. So these subpumps are automated based on the salinity data they get from the buoys and the other buoys shown in this image create a better understanding and a baseline data of the entire estuary health. This project is ongoing and again is a highly successful project and shows the use of autonomous vehicles and where they can be powerful.
This brings me to our third case study on the Mississippi River. When using an ASV in combination with an ADP which is an Acoustic Doppler Profiler, a user is able to obtain discharge measurements, cross-sectional area calculations, and velocity profiling. Another added benefit of using ADP equipped with bottom tracking functionality is the ability to leverage depth reckoning as an alternative to GPS positioning when adequate GPS satellite tracking is unable due to obstructions.
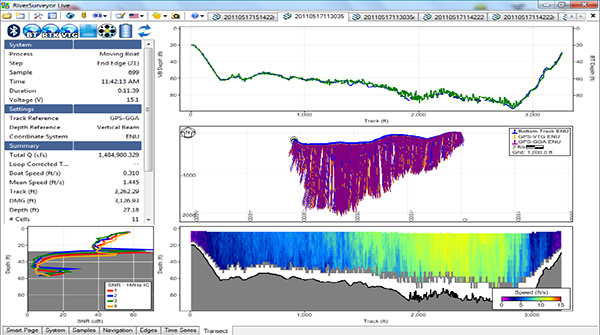
SonTek's RiverSurveyor Software
This is an illustration of SonTek's RiverSurveyor software used on the SonTek M9 ADP mounted on a vessel and also can be used on an ASV with an onboard PC running the software. This survey was performed on the Mississippi River on a section that was approximately 3,200 feet across, and with a maximum depth of 80 feet. As indicated at the completion of the transect, the discharge measurement calculated was 1.5 million cubic feet per second. Note in the cross-sectional view of the yellow shades indicating higher velocities and the blue shades near the riverbanks indicating lower water velocities.
Using ASVs for large transects like this one saves the user from mainly operating a remote-controlled vehicle over long distances with a risk of losing radio link or the need to deploy manned vessels with crew and survey technicians. ASVs also automate course correction due to set which is wind and drift which is currently using GPS navigation in harmony with onboard PC software and vehicle piloting controls. However, this can be a challenging and exhausting task on larger rivers when using remote-controlled only vehicles.
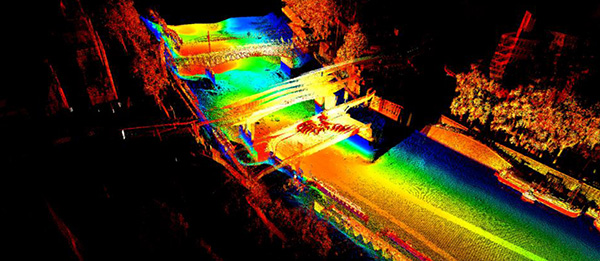
Unmanned Vehicle Data Visualization
This image illustrates the zippering of terrestrial point cloud-wide R data from Xylem's Nexus Unmanned Aerial Vehicle, or UAV. With ASV provided subsurface bathymetry data for complete 3D watershed visualization. So this is where we're combining both autonomous surface vehicle and an unmanned aerial vehicle and zippering the two data sets together. So future concepts will include water current visualization and other features from Xylem's HYPACK software team providing even more detailed characterization and modeling.
So just in case you're still skeptical about automatic vessels, I would like to leave you with a few key takeaways.
- Autonomous vessels are the future for effectively and efficiently characterizing watersheds and larger water bodies.
- Through innovation and miniaturization of water quality and hydrological center technology, compact ASVs will continue to become a popular workhorse platform without the need for solely relying on a higher operational expense and overhead of manned vessels.
- Intuitive and seamless integration by leveraging a single software package capable of mission planning, underway data visualization and advance post-processing functionality that can be with the entire vehicle sensor payload, it can operate with the entire sensor payload.
- Xylem's water quality, hydrological sensor, and survey software expertise in combination with our partner, SeaRobotics is a trusted name in ASV's development and will form a best in class autonomous surface vehicle solution.
Now I'm going to turn it over to Rob Porrett to introduce Xylem's latest autonomous vehicle.
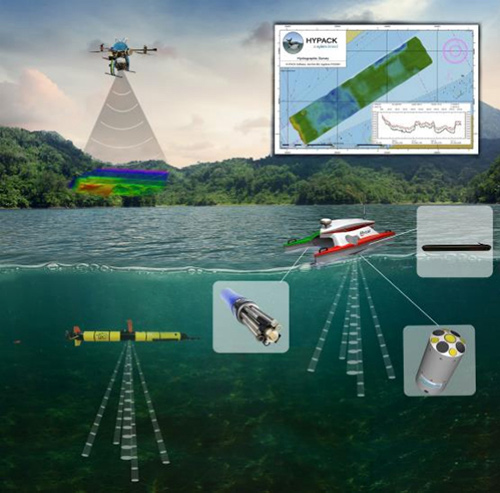
Rob: All right. Thanks a lot, Kevin, for the ASV overview. We would now like to introduce everyone on the webinar to our new product, the HYCAT. HYCAT is a fully integrated system designed to accommodate a complete payload of environmental sensors from YSI and its sister brand. In this diagram with the HYCAT, you can clearly see the tight integration of the various sensors. This vehicle accommodates an EXO multiparameter water quality sonde, SonTek M9 acoustic doppler profiler, side scan sonar systems and has a front-looking camera as well.
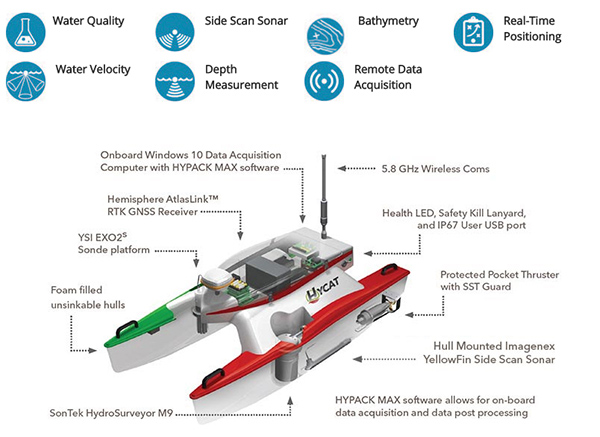
A unique feature of HYCAT is that all the data feeds directly through HYPACK Max software, which is a staple of the surveying world. This software provides a unique user interface so we can visualize and process the hydrographic data you're collecting in real-time. It is capable of not only bathymetry and cross-sectional geometry measurements, but also water velocity measurements. With this information combined, it can also calculate water discharge in rivers, inlets and so forth. At this time I actually want to leverage Geoff Douglass to give a little bit overview on some of the benefits of the side scan sonar.
Geoff: Thanks, Rob. And so we decided to add an image with yellowfin side-scan sonar to this vehicle really just to increase the capability of the vehicle. So for those unfamiliar with side-scan sonar, it's an imaging-based system, you're basically getting an image of the bottom or whatever you're lighting up with the sonar. Primary use for this, it's great for infrastructure inspection, bridge scour inspections, seawall inspections, target detection, you're looking for something so there's use for it in search and recovery applications also.
It also has a great use in bathymetry where if you're interpolating data from a single beam or even a multi-beam, you can fill in with the side scan to visually inspect and see, "Yeah okay, everything lines up with what we actually image down there. There's no anomalies in the data that we collected." These are the main benefits of the side-scan sonar. And on the HYCAT it really opens up several other markets and data sets the customers can provide from one system.
Rob: Perfect. I appreciate that feedback, Geoff. So ultimately these sensors are all built into a small yet incredibly versatile package from SeaRobotics that is easy to deploy and it's extremely easy to transport. HYCAT has been designed for surveyors to have access to areas which were previously unreachable. Here's a few additional points on the HYCAT.
HYCAT was created as a result of this partnership that YSI and SeaRobotics have been developing over the last three to four years. It's really been developed based on the size of HYCAT which really helps it make it two-person portable and it's easily transportable via pick-up bed, truck bed or SUV. SeaRobotics has put a lot of effort into developing the HYCAT to operate in a mature autonomy mode which was reviewed earlier.
Mechanically, it's really been designed to be tightly integrated or the seamless integration of our whole payload. I do want to make a note, if you look down to the lower left on the slide, you can see the integration of the SonTek M9 into the hull of the HYCAT. And then on the right-hand side, you can see the streamline of the side-scan sonar and also how the EXO2 Sonde integrates into the hull.
One last point is the overall price when we set out to develop HYCAT. A fully loaded HYCAT is going to be less than your multi-beam sonar-based vehicle, and it's going to come in at about half the size and weight.
What you see here is a visualization you get from the HYPACK developed for the HYCAT. HYPACK is an industrial proven survey software that brings together all these parameters into a nice survey package. On the left-hand side is really the representation of a typical display that you'll get with HYCAT while you're conducting a survey.
And then on the right-hand side is really what sets the HYCAT ASV apart from other ASVs. HYCAT has actually developed a HYCAT-specific autonomous surface vehicle or ASV driver and it's included in the HYPACK Max. We are able to do all the mission planning, we can get real-time data visualizational surveys underway and all our post-mission data processing visualization can be done with HYPACK.
So in summary, when we set out on this venture with SeaRobotics, really the goal was to make a best in class autonomous surface vehicle where we could incorporate the best possible sensors with no compromise, there's no surface vehicle that's currently on the market with a comparable center payload that actually hits the similar cost point and could meet the performance that HYCAT can.
We set out to design and build an ASV that can be a game changer and I believe that we actually have done that. Here are some of the additional specs that we kind of set out to meet and how we achieved. So from a size and from a weight perspective, as you can see, the size of the boat dimensionally, we're right on par with what we had targeted.
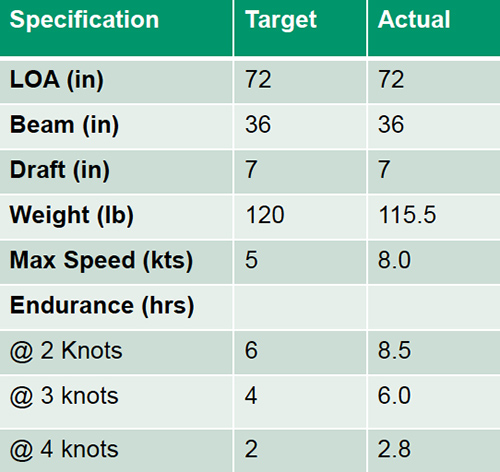
One good thing is from a weight perspective, we had targeted less than a 120 pounds and actually we did beat that by approximately 5 pounds. But what that does is really is just ensures the ease and the portability of the HYCAT into these remote locations potentially could be used for surveying.
The next metric or specification which we targeted was we really needed a minimum of 5 knots maximum speed to allow us to do reasonable surveys and such. We've actually been able to document the performance of that HYCAT at over 8 knots, which is a significant increase over what our targets were. And obviously the improvement and the power and the speed of the HYCAT due to this change is really going to open up additional areas where we potentially did not see HYCAT being able to survey, but this additional speed and power opens those areas up.
The last item which we want to talk about is the endurance or the battery power that's associated with it. As you can see, when we targeted the typical survey speed between 2 and 3 knots, so our targets were obviously between four and six. But as you can see, the overall performance and the tight integration system has been able to illustrate between six hours for 3 knots and eight and a half for 2 knots. So obviously for a surveyor, this is a very important feature of endurance. This will allow you to do a full day of survey on a single battery.
Geoff: Hey, Rob, I just want to interject for a second. An important thing to note is that all these specs that we have listed here, these are the full payload of the vehicle. So there's no specsmanship going on, this is as heavy as the boat gets and as slow as the boat's going to be. So this is just an important thing to know.
Rob: I appreciate you clarifying that. Cool. Okay. So in summary, as you can see, we were able to meet and exceed our design targets when we set out to design HYCAT.
So at this point, I wanted to kind of bring the whole presentation back together and I'm kind of calling this the HYCAT advantage. And it's really a summary of how HYCAT actually stacks up not only to the competition necessarily but more so to key criteria as you're doing surveys. We did go over and identified five tips for better water quality monitoring. And when SeaRobotics and Xylem set out we purposefully tried to address all those and we have addressed all the tips to make this a highly functional, easy to use, very productive surveying vehicle.
5 tips for better water quality monitoring
- Chose the right sensor for the job
- Autonomy Counts
- Tight integration has a payoff
- Intuitive Interfacing
- When selecting an Autonomous Surface Vehicle/sensor system choose brands with the most experience
We also went over what would be the typical survey applications one would want and what would be the sensor suites which would be able to accommodate those. And as you can see the checkmarks, we've actually been able to design in this compact, transportable vehicle six of the seven survey applications which we had identified as part of this presentation. So as you can see, this is what we call the HYCAT advantage in what's really a compelling use case.
|
Survey Application
|
Sensor Suits
|
|
General bathymetry
|
ADCP/Single beam sonar/Side scan sonar
|
|
Cartography
|
Multibeam/single beam sonar
|
|
Subsurface infrastructure inspection/
feature detection
|
Multibeam/Side scan sonar/sub bottom
profiler/magnetometer
|
|
Above surface survey
|
LiDAR/photogrammetry/video
|
|
Water quality
|
Multiparameter sondes/samplers/current profilers
|
|
Volumetric discharge measurements
|
Acoustic Doppler current profiler (ADCP)
|
|
Habitat mapping
|
Any variation of those stated above
|
Rob: So in conclusion, water is the global challenge that will define the 21st century. Many people around the world work or live in areas where they're either experiencing or facing threats of water supplies and overall water security. Xylem, with our partnership with SeaRobotics, believe we have the size and scope and we could focus to address your autonomous vehicle water monitoring needs and believe we're in a position to help address these complex water issues. Geoff, do you have something to add?
Geoff: Yeah, I just want to add, just because I see so many people are interested in this vehicle for bathymetry and we focused a lot on water quality, one important thing to note about this vehicle is that with HYPACK, HYPACK and SonTek got together and developed the capability to collect bathymetry and plot it from the M9. So the M9 has five beams, a vertical beam, and then four beams that...I forgot the angle but they're at but they are used for collecting bathymetry.
And the sensor has about a one-to-one depth to coverage ratio. So it's actually a good sensor for collecting bathymetry and that paired with the side scans to fill in and oversee what you're looking at gives you a real comprehensive system for collecting bathymetry. So I just wanted to touch on that.
Rob: No, I appreciate that feedback, Geoff. We obviously want to communicate the value of this in as many ways as we can so thank you.
